2023年MOT中极简单的新SOTA
论文:(WACV 2023) Hard to Track Objects with Irregular Motions and Similar Appearances? Make It Easier by Buffering the Matching Space
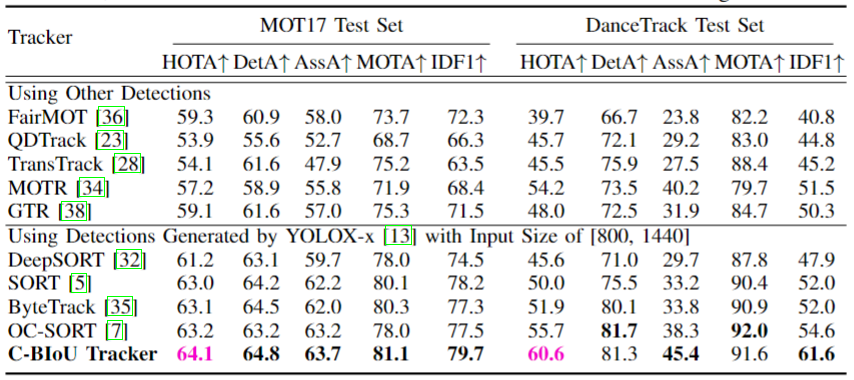
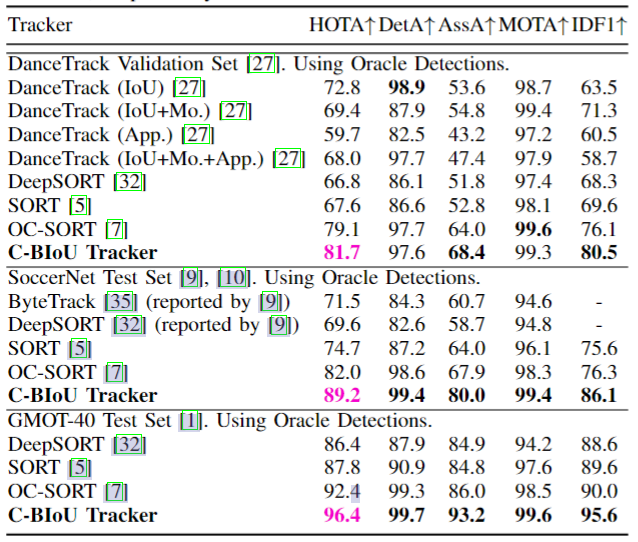
本工作(记作C-BIoU:Cascade Buffered IoU)主要用于不规则运动与不可区分的外观两个问题叠加的MOT场景。本工作提出的方法极为简单,但非常有效,实现了MOT 17、DanceTrack、SoccerNet、GMOT-40 四个数据集上的最新SOTA!本文提出两个创新点:一是提出用级联-BIoU实现相邻帧中不重叠的检测和轨迹的匹配(IDF1 +5.7%, HOTA +3.6%);二是用前n帧的平均运动代替卡尔曼滤波实现运动估计(IDF1 +1.2%, HOTA +1.5%),这样可以消除卡尔曼滤波中的线性运动假设以及相机运动带来的估计误差。标出的性能提升为在DanceTrack验证集的结果。
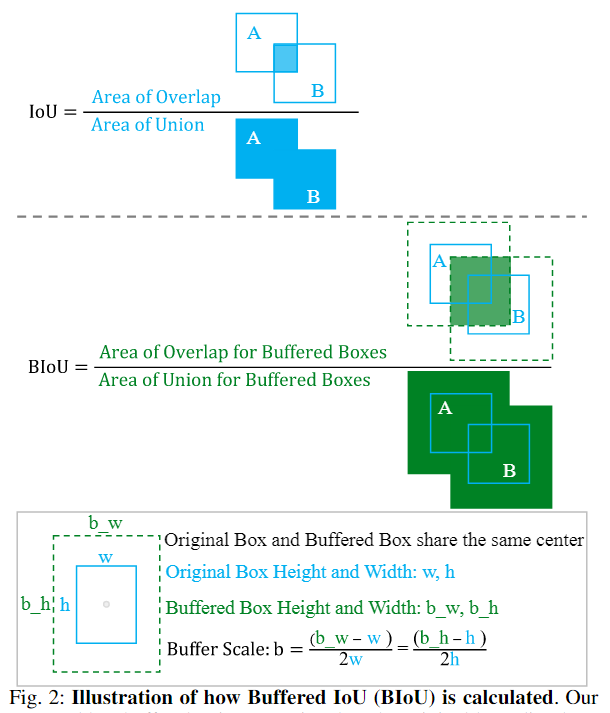
其中BIoU的定义如下图:
算法流程如下图所示:
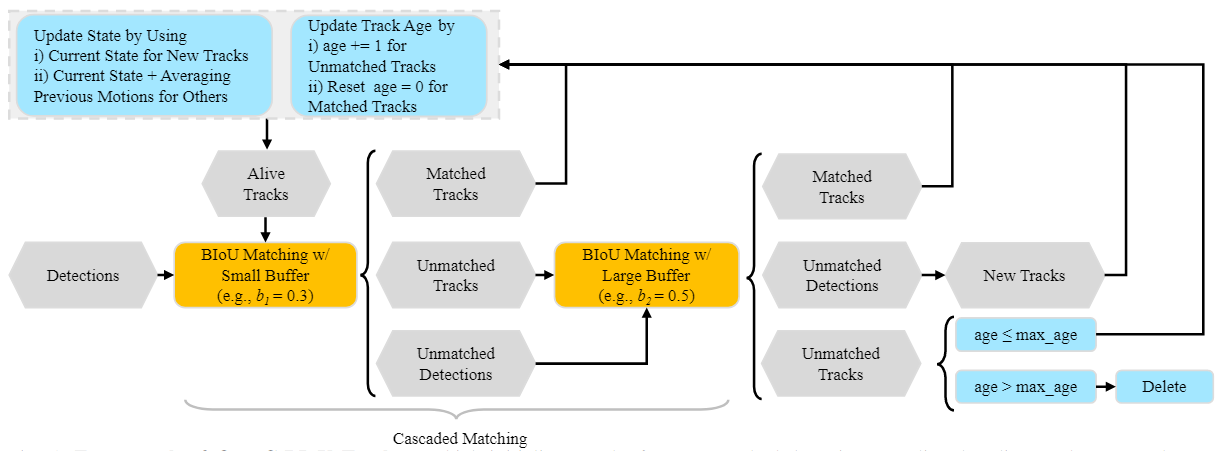
首先,使用小缓冲区$b_1$匹配 alive 轨迹和检测,然后使用大缓冲区$b_2$再次匹配未匹配的轨迹和检测。超参数$b_1$和$b_2$通过网格搜索确定。运动状态估计如图左上角第一个蓝块所示,不用卡尔曼滤波,而是用$n$帧的平均运动代替,$2\leq n\leq 5$,$n$为匹配到检测的帧,$\Delta$为未匹配的帧数。状态$s$表示为:
$$
s^{t+\Delta}=o^t+\frac{\Delta}{n}\sum_{i=t-n+1}^{t}(o^i-o^{i-1})
$$
轨迹管理方法,即决定如何以及何时初始化、更新和终止轨迹,与SORT保持一致。
在四个数据集中的结果对比如下: